滑模控制思考
滑模控制思考
滑模控制率设计
针对 MIMO 的系统,介绍如何根据 基本滑模控制简介和示例 提到的滑模控制设计思路建立滑模面,注意如果输入可以解耦的话,可以直接针对每个输入进行单独的设计就可以了
考虑这样的一个系统模型:
定义其滑模面为:
其中滑模面需要满足 2 个条件:
- 当 s=0 时,有 y→0;如果是跟踪问题 y 替换为 e 就可以
- relative degree = 1
relative degree 的意思是 中显含 u,因为只有这样我们才可以根据 的形式推出 u 的表达式,使得滑模变量按照设计的滑模面趋向 0
一种设计滑模面的方法
考虑一个 relative degree = 4 的系统,这意味着在 中首次显含 u,因此为了 使得滑模面 s 的 relative degree = 1, s 中必然包含 ,或者说
对上面系统,考虑这样一个 3 阶的系统:
先不考虑滑模控制,注意到系统是完全可控的,使用经典的 全状态反馈,有:
此时闭环系统结构为:
^eqn-control-structure
事实上这就是配置闭环系统的极点,此时设计 可以使得闭环系统稳定,从而期望的状态收敛为 0
note
关于状态反馈的实现可以参考四旋翼无人机轨迹控制
上面的设计思路给我们这样的启发,如果只看 ^eqn-control-structure 的最后一行,实际上给我们这样一个系统的等价表达形式:
而如果取这个为滑模面,就可以保证其收敛,其形式为:
^eqn-sliding-mode
note
我个人的想法是,滑模面实际上是一个状态空间中的几何结构。如果采用状态反馈可以实现系统稳定控制,那么这个几何结构就包含了状态空间中的零点。换句话说,存在一条在该滑模面上的光滑曲线使得初始状态作为曲线起点,零点作为终点
^630fc4
remark
如果使用这样的状态反馈来生成滑模面结构,实际上就启发我们可以使用其余的控制方式来生成滑模面,比如PID。
@liuSecondOrderSlidingMode2021好像就是用PID滑模面做的
除了上面的选取方法,还有一种思路是研究系统:
然后计算 u 带入控制方程后的系统的稳定性,就是经典控制理论中的传递函数分析
控制量设计
在确定好了滑模面结构后,我们期望将滑膜变量控制在滑模面上,因此可以通过这个 滑模面的约束关系 导出控制量 ^e88787
对 ^eqn-sliding-mode 设计约束关系为:
如果按照这个约束方程,可以通过 李雅普诺夫稳定性 来证明滑模变量是大范围渐进稳定的
因此有:
^eqn-control-law
从而可以得到:
根据上式,为了计算控制向量,我们需要系统的全状态 x 以及输出的各阶导数,这意味着需要 观测器 + 求导,会引入很多误差
误差分析
为了考虑观测误差、传感器误差、计算误差带来的影响,将 ^eqn-control-law 改写为:
^eqn-sliding-mode-with-error
其中 a, b 是观测、测量、计算出的值 (将其汇总),s 代表真值, 代表我们实际使用的 s 的值, 代表用于计算控制输入的值和对应真值的差
可以根据上面的示意式子推得:
^eqn-ds-with-error
可以搭建一个 滑模变量收敛 的示意模型,展示 s 收敛的情况:
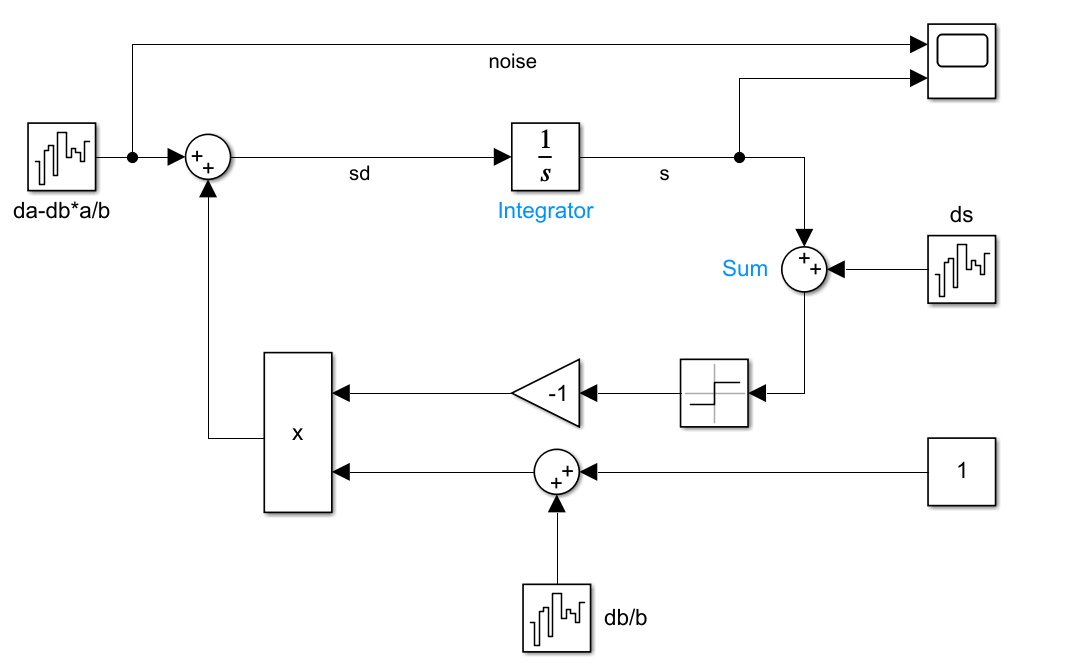
其中 band width white noise 的 noise power 设置为 0.01,s 初始值为 5
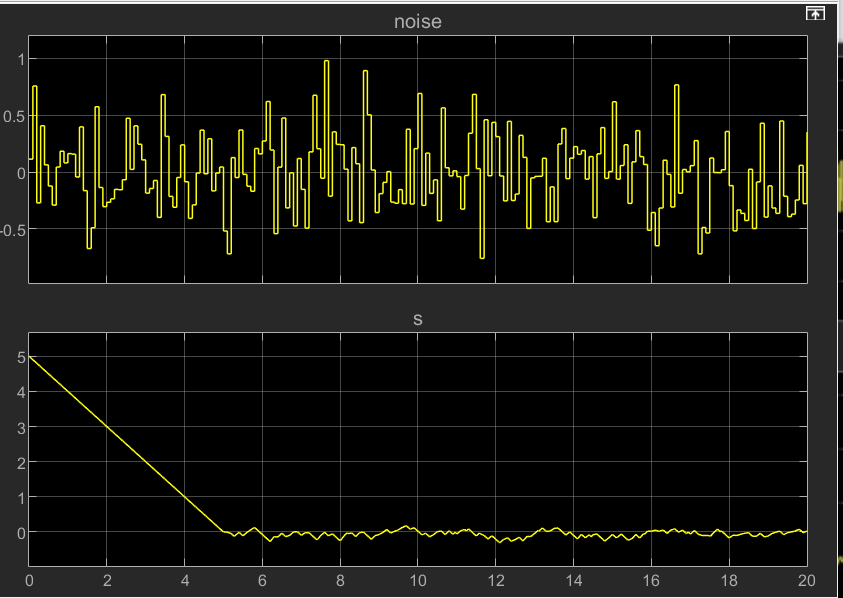
可以发现,在设计的反馈结构下,其滑膜变量在未知干扰下还是可以快速收敛
什么事滑模控制的有限时间收敛
微分方程解释
知乎上 [1] 给了从微分方程角度的解释,摘录如下:
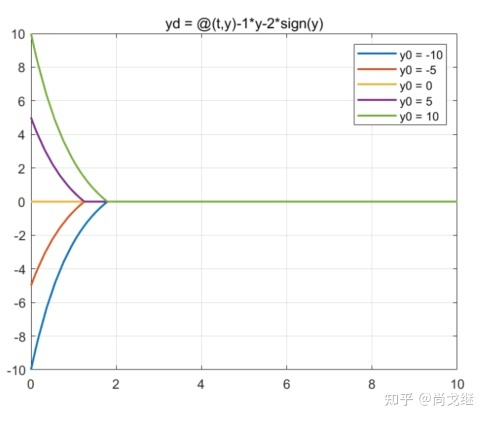
考虑这样一个微分方程:
其解析解为:
不同初值情况下 的变化情况如下:
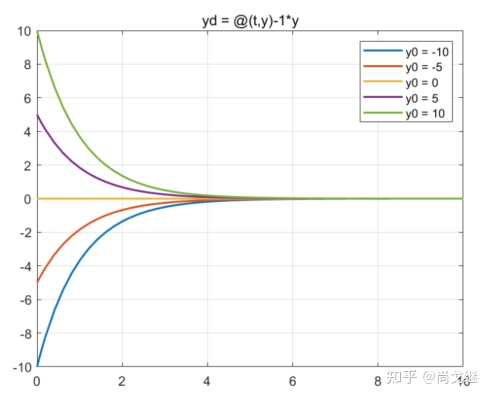
但是可以发现,这个情况 并不是有限时间收敛的指数收敛/渐进收敛,因为永远得不到严格的
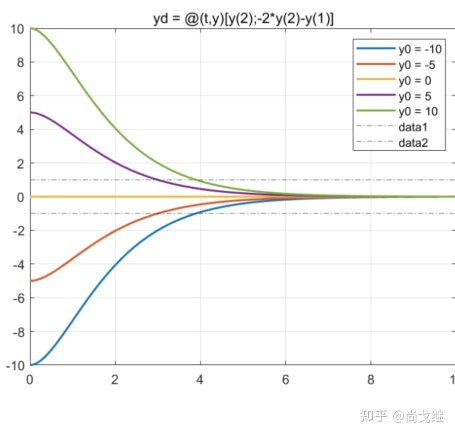
但是如果考虑:
此时系统可以表示成一个一节系统的传递函数:
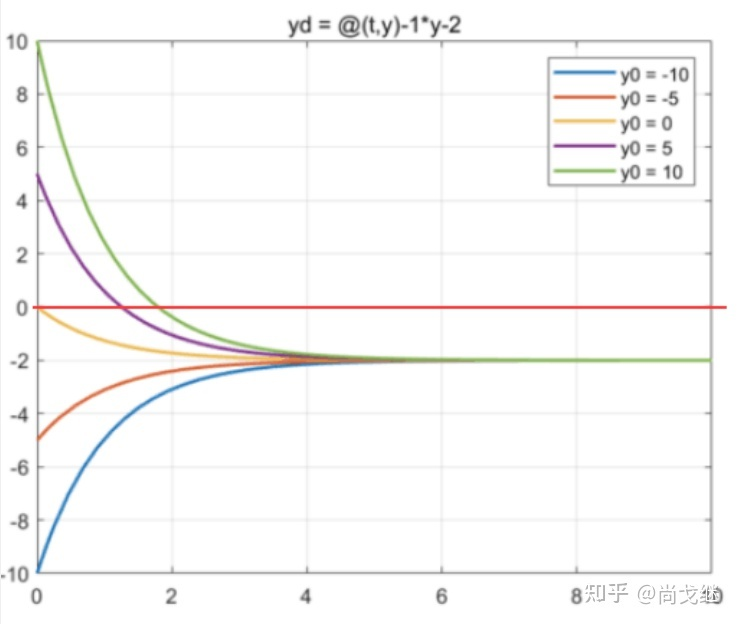
这种情况下虽然依旧是指数收敛,但是如果以收敛为 0 为目标,可以看到最上面的两种初始情况都能保证在有限时间内有 y=0 ,但同时,引入这个常数偏置项的后果是,最终收敛的值并不是 0。
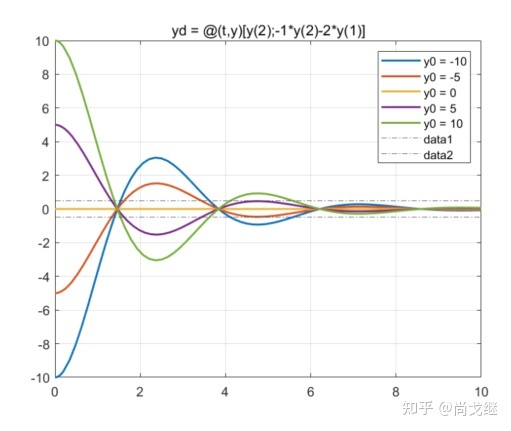
考虑这样一个系统:
 这样的系统就是有限时间收敛
这样的系统就是有限时间收敛
有了上面的基础我们可以开始讨论滑模控制的有限时间收敛了
滑模控制具有 2 个阶段:
- 系统收敛到滑模面:
- 系统在滑模面上收敛至原点:
滑模控制的有限时间收敛,主要是让第一个过程有限时间收敛,因为两者是先后发生的,如果两个过程都是渐进收敛,那么系统 整体的收敛到有界的时间 就不好计算,但是如果第一个过程有限时间收敛,第二个过程有限时间有界收敛,那么整体的收敛到有界的时间也就比较好算,系统性能有保证。
当然也可以让第一个和第二个过程都有限时间收敛,但个人认为意义不大。因为现实中不可能存在真的收敛为 0。只需要研究对应的滑模面,通过设计常数保证有界收敛足够快就可以。
比如:
而
通过设计滑模面的参数,可以控制到达滑模面之后的系统表现:抖动、速度、稳态值。
实现方法
使用 李雅普诺夫稳定性 方法,构造并证明其方法
考虑滑模面动态满足: ^eqn-sliding-mode-with-error
推导得到: ^eqn-ds-with-error
构造李雅普诺夫函数:
参考 定义,为了使得有限时间收敛,构造条件:
从而需要有:
最终控制参数 需要满足:
实验参考代码:
%研究不同的滑模面设计s(x)和不同的滑模面初值s(x(t_0)) 对x的影响
clear all
close all
clf
tspan = [0 10];
num_line = 5;
initial_value_range = 10;
y0list = linspace(-initial_value_range,initial_value_range,num_line);
% example 1 : y' = - y
% fun = @(t,y) -2*sign(y) ;
% order = 1;
%
% % example 2 : y'' = -2y' - y => (y)' = (y') & (y')' = -2(y') - (y)
fun = @(t,y) [y(2);-1*y(2)-2*y(1)];
order = 2;
% example 3 : y'' = -y' - 2y
% fun = @(t,y) [y(2);-y(2)-2*y(1)];
% order = 2;
for i = 1:1:num_line
%这里对于高阶的系统,只有0阶导有初值,高阶导皆为0
%如果需要测试高阶导也有初值的情况,更改下面y0的表达式
y0 = y0list(i)*[1,zeros(order-1,1)];
[t,y] = ode45(fun, tspan, y0);
plot(t,y(:,1),'linewidth',1.5,'DisplayName',['y0 = ',num2str(y0list(i))])
hold on
end
title(['yd = ',func2str(fun)])
yline(-.5,'-.')
yline(.5,'-.')
legend
grid on
离散时间滑模控制的时延问题
问题构造
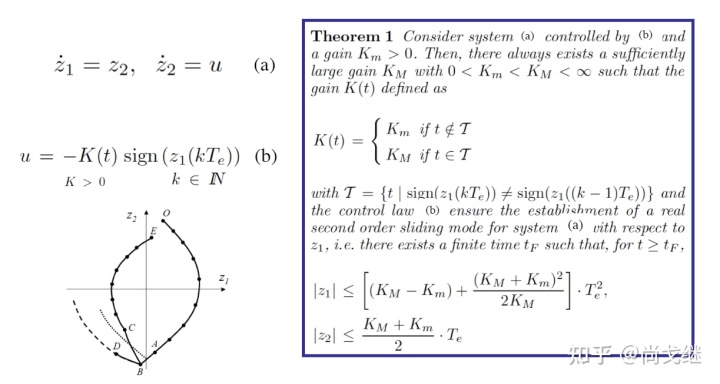
考虑这么一个系统,这里用的是高阶的滑膜,但其实先不考虑滑膜的问题,只把它当一个普通的系统来看,这里主要说明的问题也与高阶滑模控制无关。
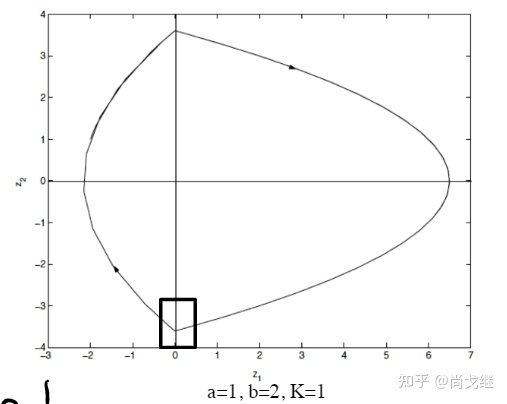
如果不考虑采样时间,这个系统的相轨线如下图是一个稳定的闭合曲线:
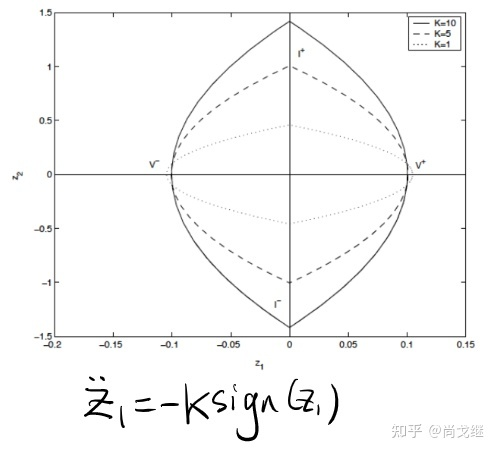
如果系统如下式子:
此时系统稳定的条件是
同样不考虑采样时间,系统的相轨线为:
但是如果考虑了采样时间之后,系统的真实相轨线为:
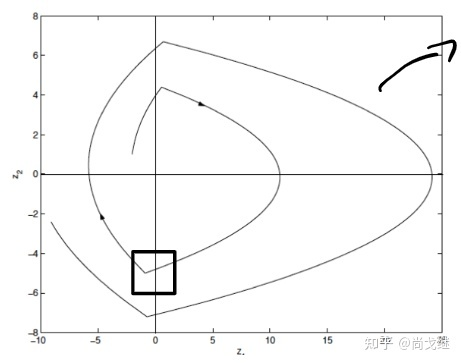
因为在 z1 变号之后的下一个时刻,负责计算控制信号的处理器还不知道 z1 变号,所以 sign(-) 还是用的之前的符号,这就导致一个时延,也即图中方框里的内容,结果是系统发散了,这很明显不是我们想要的。
解决方法
有一个非常简单粗暴但实用的方法
写得很复杂,原理一句话就能说清楚:
在”处理器“(或者说计算单元)察觉到 z1 变号之后的计算下一个 u 的时候,把 k 增大。注意只在这一步增大,没有变号的时候就用正常的 k。
结合图来解释这个原理:
- 考虑采样时间,且全程不改变 k 值,那么就是 A->B->D->....系统逐渐发散
- 考虑采样时间,且使用这里上面提出的方法:在 B 点,处理器察觉到 z1 变号了,把 K 增大,把相轨线“扭”过去,这样能保证系统依旧稳定。
如果仿真地久一点
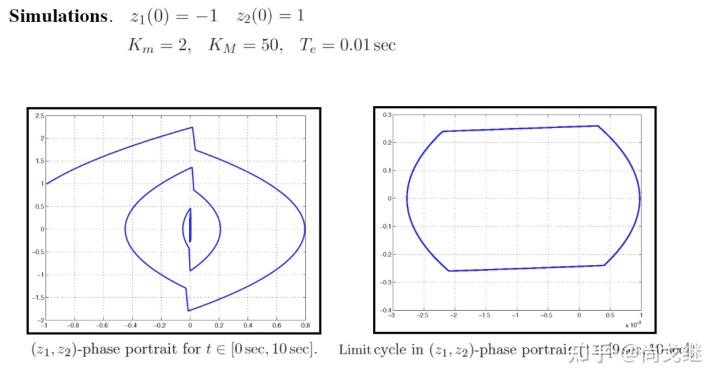 可见这个离散时间系统保持稳定,逐渐收敛到有界,z1 和 z2 都在 0.001 以内波动。
可见这个离散时间系统保持稳定,逐渐收敛到有界,z1 和 z2 都在 0.001 以内波动。