现代控制理论状态反馈的思考
2022年8月9日
现代控制理论状态反馈的思考
描述
现代控制理论 中介绍了状态反馈这个概念,但是我对其中 P 矩阵的实现细节有些疑惑。
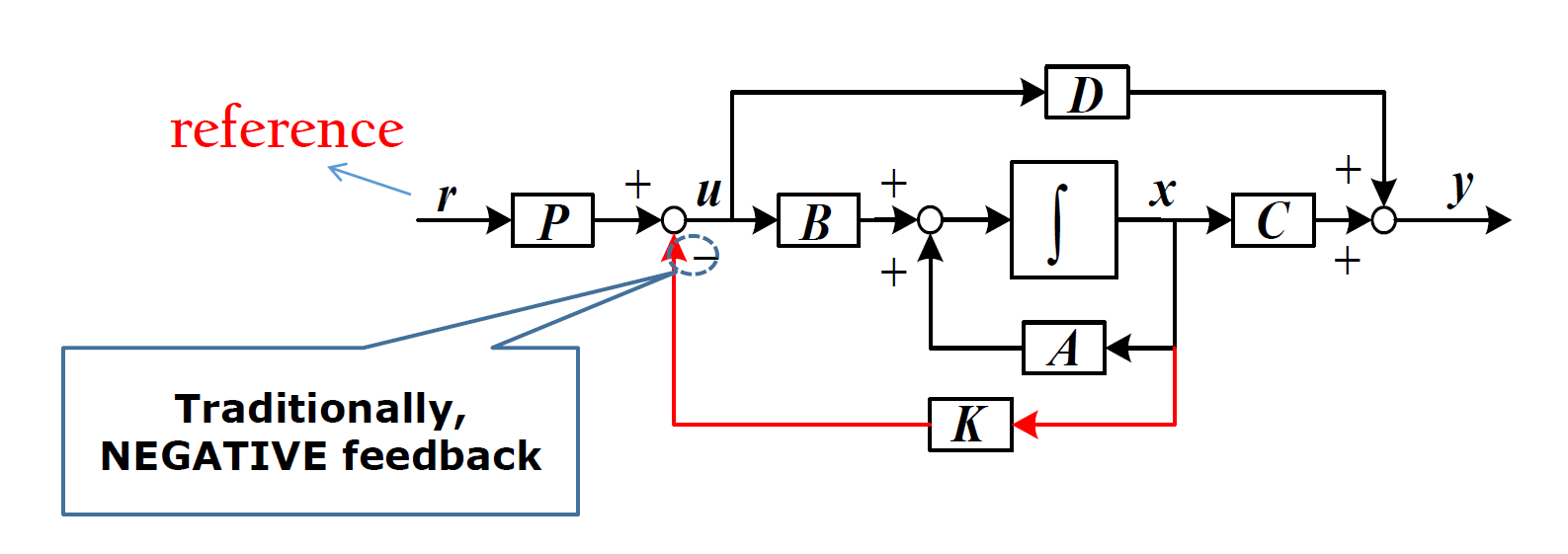
现代控制理论中 reference 前面乘了矩阵 P,上课的时候一般都是 P=I 就跳过了。但如果 P 不等于 I,此时如何配置状态反馈极点呢?
举例来说,大作业中的四旋翼无人机,输入向量为 4 维向量,线性化后的系统有 8 个可控状态向量,那么根据这 8 个状态向量设计状态反馈,计算出了反馈矩阵 K。但是这里的 P 应该怎么选取呢?
换句话说,
problem
按照第二可控规范型的思路配置极点过后,怎么设计这样的 P 来将 8 维的向量转换为 4 维的输入向量呢?
^p1
问题在于,我期望的的轨迹是一个 12 维的向量,但是实际上输入是 4 维的,那如果 p 矩阵不影响状态反馈的配置的话,这个 p 应该怎么选取呢? 我感觉 p 矩阵承担的作用是将这个 12 维的期望轨迹映射到 4 维的输入力上面,我就不太清楚这个 p 应该怎么设计了
problem
我很好奇的一点是误差为6维的向量,控制量为4维。在状态反馈已经配置好极点过后,实际上可以通过调节增益矩阵使得输入控制量u为6维误差向量的其中任意4个分量。这样看起来相当于根本不需要设计6维的轨迹,设计4维的轨迹就够约束控制系统运动了,这和直观理解是不一样的。更进一步,如果状态更多,无论状态是多少,只需要设计4个轨迹就能实现完全可控我感觉很奇怪。
^p2
解答
note
By 现代控制理论 石宗英 老师
- 以四旋翼为例,四旋翼模型的输入 u 是升力(4 个分量),状态如果包含位置姿态及其变化率是 12 维。如果考虑轨迹跟踪问题,通常指三维空间的位置轨迹(速度包含在位置的变化里),而姿态角决定了四旋翼水平方向的受力(决定了水平方向加速度),所以四旋翼的控制系统通常由内环(姿态控制环)和外环(位置控制环)。以其中的姿态控制环来说,参考输入是理想的姿态角(随时间变化),需要设计控制输入 u 使实际姿态角跟上参考姿态角,所以一般是将参考输入与实际状态做差即得到跟踪误差,跟踪误差经过一个控制器产生控制量 u。如果这个控制器就是一个比例增益,根据框图的等效关系,把状态反馈的加和节点移到内侧,则参考输入通过增益矩阵作用到 u。增益矩阵可以不是方阵,但没关系,我们这里关心的是 u 对系统状态的可控性,而不是关心参考输入对系统状态的可控性,这和课上讨论的是不一样的
- 是否用比例增益就可实现轨迹跟踪分析后才能下结论。姿态环的角位置轨迹是 3 维。如果增益矩阵不满足行满秩,只能说明 u 的几个分量之间可以相关,和能否实现期望的几点配置没关系。因为实际系统可能只需要 u 中的部分分量就能实现状态的任意调节。
- 状态方程描述的是动态系统(有微分),不是代数系统,所以不能这样。如果系统状态是 6 维,控制量是 4 维,状态完全可控只意味着存在控制器能实现状态任意调节,但控制器应该是什么形式就是另一个问题了。6 个状态分量之间是线性独立的,假设讨论的是状态跟踪问题,无论哪一维有误差,都应该在 u 中有体现,否则不可能实现跟踪
- 这里参考输入指希望系统跟踪的参考轨迹,由系统任务决定
针对 ^p2,老师解答是:
- 一个系统,如果控制的维数少于状态的维数,也可以实现状态的任意调节,有一点以时间换“空间”的意思。比如一个离散系统,控制输入 1 维,状态 3 维,为将状态从原点转移到任意状态,1 步是做不到的,至少需要 3 步。连续时间系统没有节拍的概念,但道理类似
hint
解答提示
本质上我们做状态反馈的极点配置有 2 件事要干:
- 根据系统控制方程 配置极点
- 这一步是为了保证系统状态的稳定性,至少可以让系统在给定输入下不至于发散,给我们做后面的稳态误差控制做基础
- 根据设计的闭环系统状态方程,设计 P 矩阵 来控制系统静态增益
- 这一步才是核心!有了前面极点稳定的条件,可以在此基础上设计静态增益,来满足误差条件
- 使用终值定理的前提是 系统状态稳定
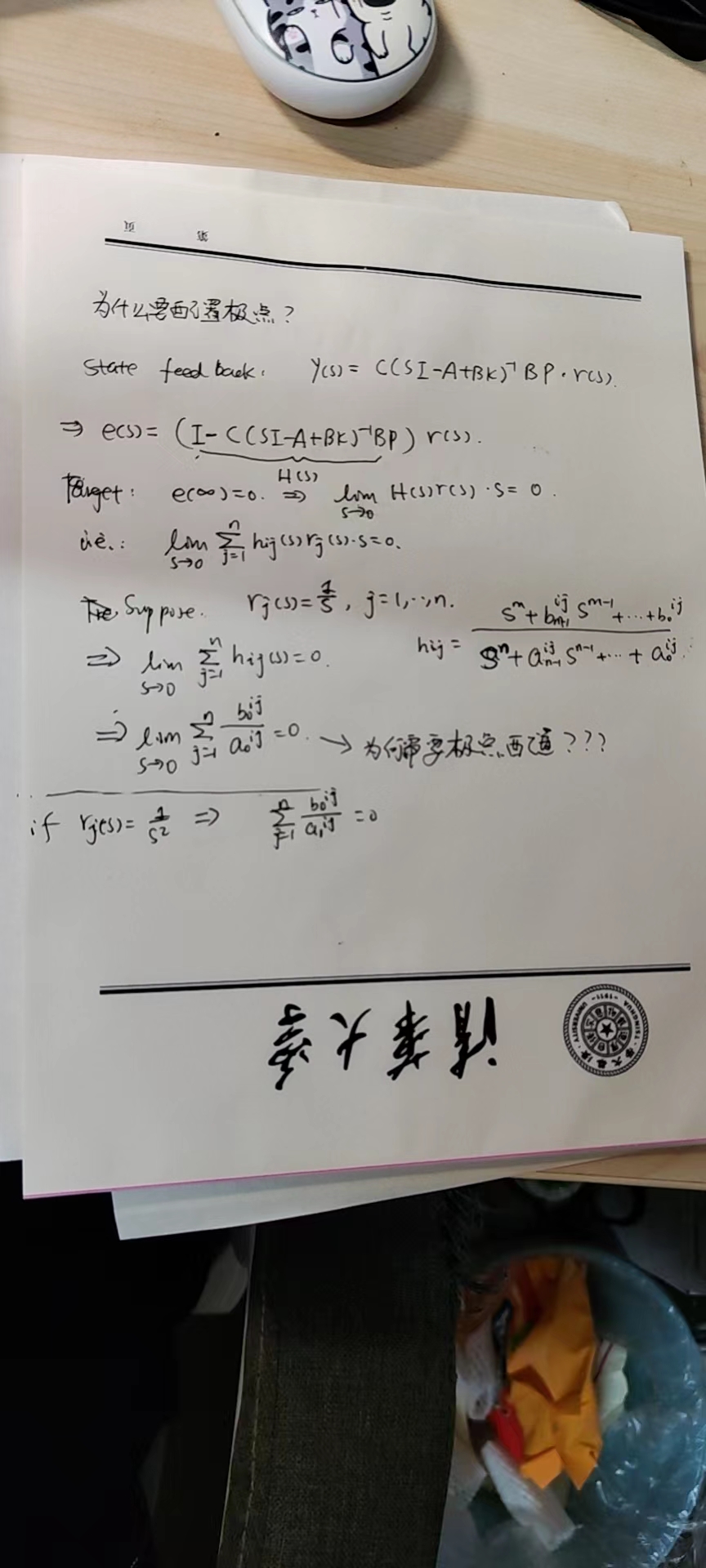
- 忽略其中的 “为什么要配置极点” ,取其计算式子,这就是如何配置静态增益的方法
总之:
- 所以说配置极点方法只能保证可控系统稳定,但是不保证输出误差趋近于 0;如果要趋于 0 需要更进一步的分析
- 那可以理解为,如果用状态反馈来做轨迹跟踪控制比较困难,它用来做稳定器比较合适(因为设计 P 矩阵蛮麻烦的)
- P 矩阵是用来配置误差分量的静态增益的,配置极点是其必要条件
- 闭环之外的 P 矩阵可调节静态误差,其实和配置极点没关系
- 如果将跟踪误差作为状态(分量),极点配置方法就有效了
- 配置完极点还要再算增益矩阵 P 来消除静态误差
note
还可以试试把状态反馈增益移到(参考位置与实际位置的差)的后面,就是比例控制,不必单独考虑P,可以进一步考虑如何定量计算
参考
引文
脚注
Loading...