导纳_阻抗控制
导纳_阻抗控制
导纳/阻抗控制
定义
重点:人与机器人之间的交互关系
从实际问题出发,问题背景:对外骨骼膝关节这样的一个关节进行柔顺算法控制,力图使得人能以很小的力带动外骨骼小腿摆动 (大腿看作固定坐标系),即希望人使用小的交互力去控制外骨骼膝关节运动。
牛顿第二定律启发的控制
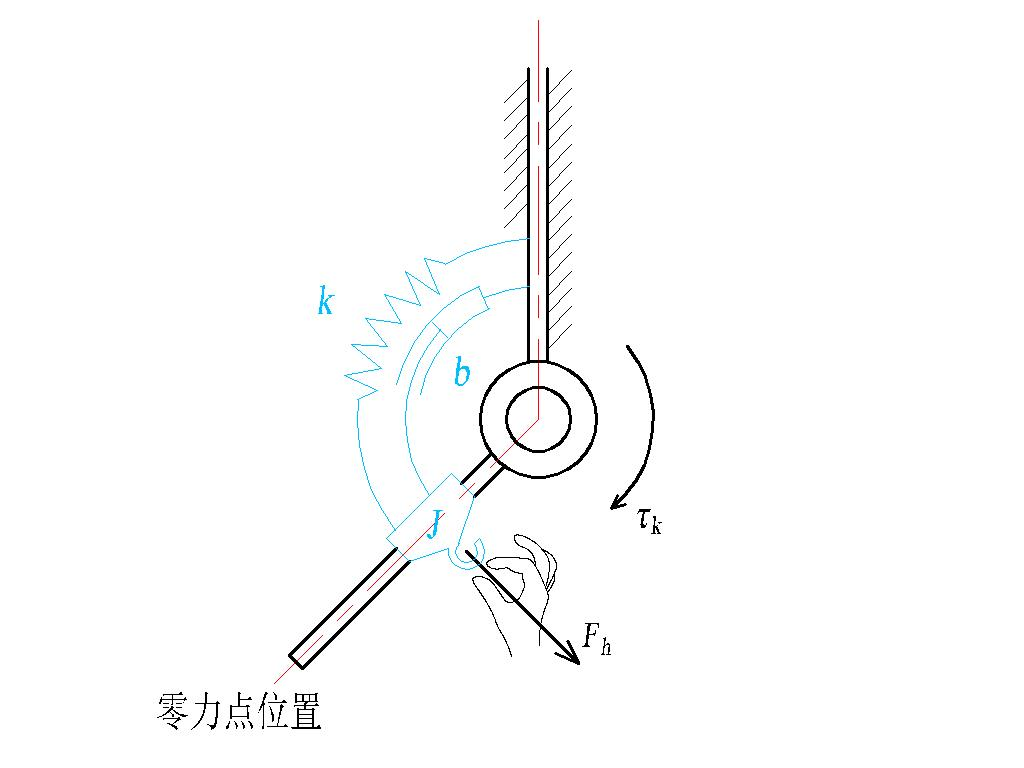
首先从牛二律开始,对于理想的一个小腿杆,可以看成下面这个图:
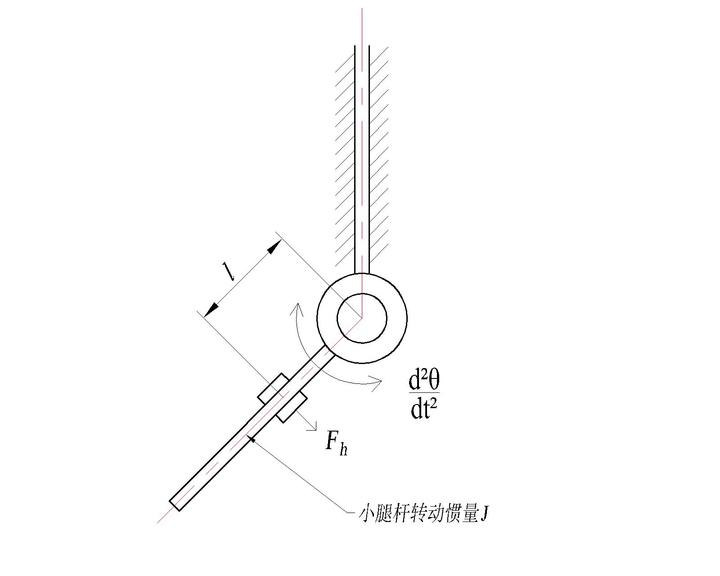
其中满足: ^a5d741
在一定的交互力下,这个转动惯量 J 越小,外骨骼膝关节的转动加速度越大,穿戴者的拖动体验越发轻快。
但实际情况下,我们控制外骨骼机器人是通过控制电机扭矩 实现的,实际的转动惯量为 ,有:
^9dcbe6
我们期望的是交互力按照 此式 来体现,而另一方面实际的外骨骼关节动力学关系需要满足 实际的力学方程,因此可以认为 理想交互力 是一个约束条件,满足此约束下可以得到:
此式中,只有实际的膝关节转动惯量 未知,但可以通过系统辨识得到。
阻抗控制
物体的动力学关系除了牛二律之外,还有粘性定律,胡克定律。前者描述了力和速度的关系,通过阻尼系数 b 表征;后者描述的是力与位移的关系,使用刚度系数 k 表征。三者合一可以得到经典的阻抗模型,满足:
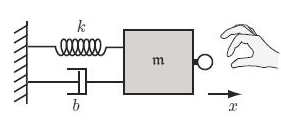
类似前面牛二定律启发的控制关系,让交互力和运动关系呈现牛二关系,该控制方法可以称为“牛二控制法”,那么如果使交互运动关系呈现阻抗模型,就引入了“阻抗控制法”。
具体来说,如果在关节参数已知的情况下,通过系统的运动量求出力/力矩,这就可以称为阻抗控制。
实际应用中,在机器人关节电机存在力矩控制器时,可以在其前面增加一个阻抗控制器,从而实现机器人关节和环境的柔性互动。
当期望轨迹为 0 时,即希望机器人关节不动,此时在阻抗控制下,整个关节呈现的动力学特性应该贴近于设计的阻抗模型,因此你可能会看到机器人关节像弹簧那样运动,或者带有一点阻尼在里面,又或者感受到很大的惯性。这些感受来自于阻抗模型中的刚度、阻尼、惯量参数。因此通过调节阻抗模型的这三个参数,可以获得丰富的“柔性”效果。
当人体穿戴外骨骼运动时,人体的运动总是先于外骨骼,外骨骼接收期望轨迹,使用阻抗模型输出关节力矩,驱动外骨骼腿杆运动。整个过程是一个轨迹跟踪的过程,其中加入的阻抗控制模型使得这个跟踪更加平滑。
外骨骼采用的方案如果是通过采集人机交互力来控制,那阻抗控制仍然不能使用,因此就需要用到与阻抗控制相对的 导纳控制。
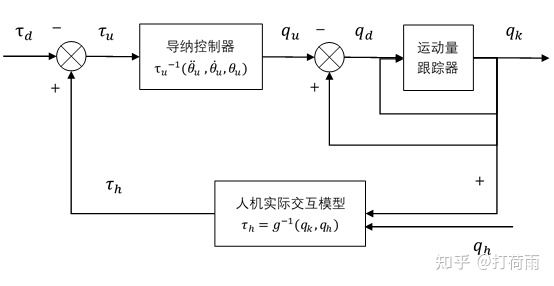
导纳控制
阻抗控制是输入运动量,输出力量。如果反过来,知道力量 ,求膝关节运动量 ,输出运动量,这个过程就是 导纳控制。
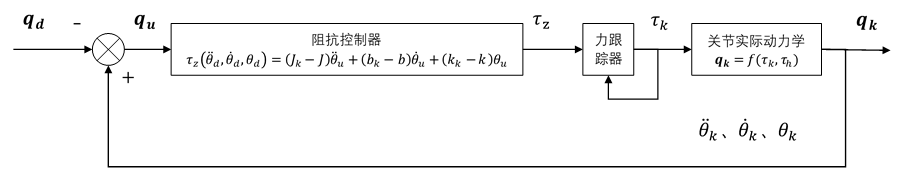
相对应的,导纳控制器必须与一个运动跟踪器合起来用,通常采用 PID 作为跟踪器。采集到的力量先输入导纳控制器,输出了期望的运动量,运动跟踪器接收它,然后输出机器人关节实际的运动。
==使用导纳控制的初衷是为了获得一个人机跟随效果,因此导纳控制所需要的力量就应该是人机交互力矩 而不是外骨骼机器人关节电机施加或受到的力量。==因为外骨骼关节受到的力矩包括了交互力在关节处造成的交互力矩,也包括外骨骼和负载分摊在关节处的负载力矩。
其中:
相对于阻抗控制器直接代入求得力矩,导纳控制器需要求解二阶微分方程。由于控制系统一般都是离散系统,因此在求解微分方程上可以用一些数值迭代方法。
- 积分迭代方法
认为 和 是上一周期的已知量,即 ,因此上面的微分方程可以写为:
然后对于计算出来的 进行两次积分有:
其初始条件可以根据实际情况设计。
- 微分迭代法
类似于积分迭代,只不过先求取 ,在通过离散微分求得
这两种方法区别在于可以直接获得的运动量是什么,比如外骨骼机器人关节一般带有编码器,因此可以直接得到位移量,因此使用积分迭代法比较简单。
可以看到,导纳控制器中的输入力量 ,当想要使用小的交互力去控制外骨骼,乃至零力控制时,期望交互力矩 可以设置为 0,这时人机交互例句就是导纳控制器的输入力矩,在通常的人机跟随的导纳控制中就直接将其作为导纳控制的输入了。否则就是需要一定的力量门限去拖动外骨骼,人先克服这个交互力门限,剩下的力气才是有效的交互力(类似于电路中的死区)。
总结
阻抗 - 导纳控制为何会被称为柔顺控制,其根本在于其控制模型中加入了柔性所具备的三个调节参数:刚度参数、阻尼参数、惯量参数。
- 刚度参数 就像加入弹簧一样,影响人机交互“弹不弹”的特性。刚度大,弹性就越差,机械感就越强;刚度小,回弹性好,越容易拖动它。
- 阻尼参数 就像加入阻尼器一样,影响人机交互“粘滞感”的特性。阻尼大,速度越快阻力越大,像是在搅浆糊;阻尼小,就越像空气。
- 惯量参数 就像加入秤砣一样,影响人机交互“重不重”的特性。惯量大,初始静止时很难推动,运动中很难让它停下来;惯量小,犹如手表秒针快速地摆动。
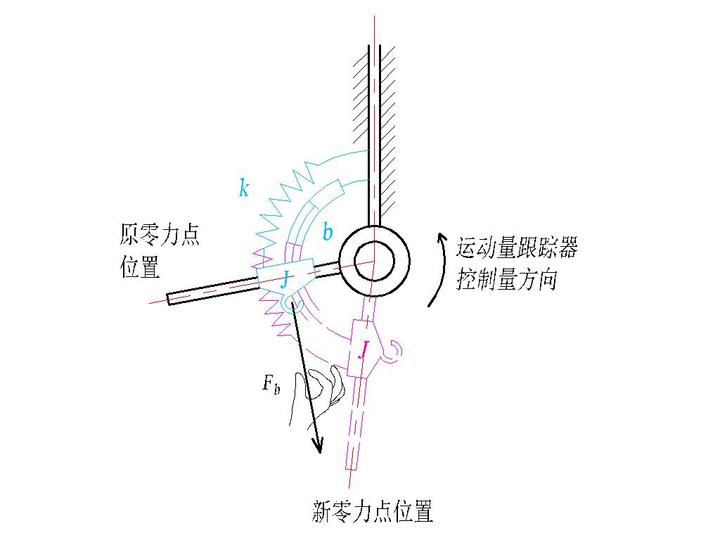
从牛顿第二定律出发,能顺利推出阻抗控制中的单惯量形式的表达式,这说明了阻抗控制是一个普世的关于“物体交互的动力学”方法。阻抗模型也是一个经典的二阶控制模型,其等效模型关键在于零力点的位置不变,拖动机器人只是增加了非期望的偏移,因此修正。
而导纳控制因为涉及到通过力量求解运动量,需要求解微分方程,所以更难理解一些。导纳等效模型关键在于零力点是变动的,而且是根据人机交互力通过阻抗模型生成新的零力点,再用运动量跟踪器完成实际的位置变化。