@liuSecondOrderSlidingMode2021
@liuSecondOrderSlidingMode2021
liuSecondOrderSlidingMode2021
MetaInfo
文献标题
Second-Order Sliding Mode Control Design Subject to an Asymmetric Output Constraint
Abstract
In this brief, a novel second-order sliding mode (SOSM) control method is developed to solve the asymmetric output constraint problem by using a power integrator and barrier Lyapunov function (BLF). The new BLF is first constructed based on the asymmetric constraint condition. A novel SOSM algorithm is then constructed for the nonlinear systems with an asymmetric output constraint. Under the proposed SOSM algorithm, the output of the resulting closed-loop system will never escape from the asymmetric constraint. Finally, a pendulum system is adopted to verify the validity of the theoretical results.
Contents
问题描述
问题背景
- First order sliding mode (FOSM) has 2 obstacles
- pratical system has confined outputs
- eg. the sideslip angle of an electric vehicle should be constrained within a small range
问题难点
Liu et al_2021_Second-Order Sliding Mode Control Design Subject to an Asymmetric Output
前人工作
results can be divided into 2 types:
- Liu et al_2021_Second-Order Sliding Mode Control Design Subject to an Asymmetric Output
- complicated since implementation depend on computationally intensive algorithms
- Liu et al_2021_Second-Order Sliding Mode Control Design Subject to an Asymmetric Output
Inspired by ^blf-fault
本文工作
本文意义
- Liu et al_2021_Second-Order Sliding Mode Control Design Subject to an Asymmetric Output
- Liu et al_2021_Second-Order Sliding Mode Control Design Subject to an Asymmetric Output
- Liu et al_2021_Second-Order Sliding Mode Control Design Subject to an Asymmetric Output
实验方法
Preliminaries and Problem Statement
Notion:
- and are positive constants
- denotes
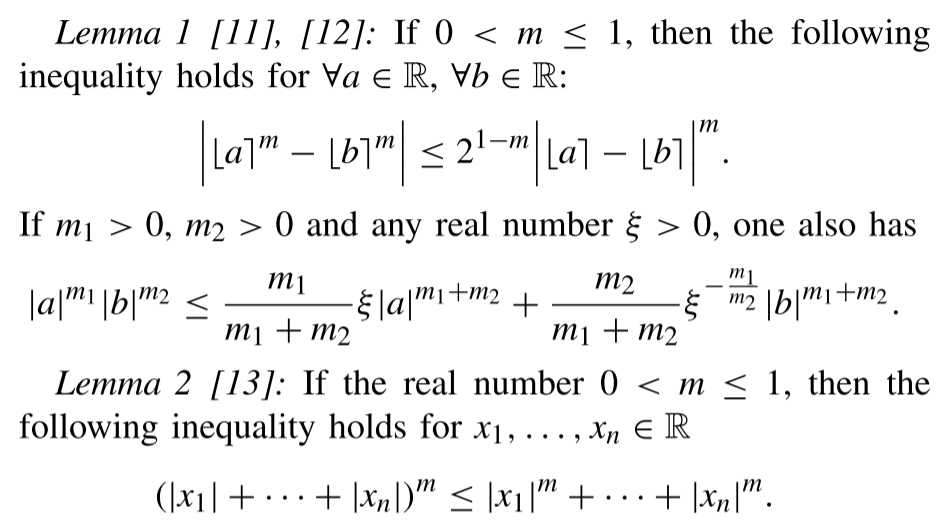
Preliminaries
Problem Statement
nonlinear system:
^eqn-nonlinear-system
where is state and input, is output function(i.e., the sliding variable)