@edwardsAdaptiveContinuousHigher2016
@edwardsAdaptiveContinuousHigher2016
edwardsAdaptiveContinuousHigher2016
MetaInfo
文献标题
Adaptive continuous higher order sliding mode control
Abstract
This paper is concerned with the development of an adaptation structure which can be applied to conventional, super-twisting and higher-order sliding mode schemes. The objective is to alter the modulation gains associated with these schemes in such a way that they are as small as possible to mitigate chattering effects, but large enough to ensure that sliding can be maintained in the presence of bounded and derivative bounded uncertainties. In all the proposed schemes, the equivalent control is used to drive the adaptive mechanism. The approach is based on a novel dual layer nested adaptive methodology which is quite different to the existing schemes proposed in the sliding mode literature. The new adaptive schemes do not require knowledge of the minimum and maximum allowed values of the adaptive gain, and in their most general form, do not require information about the bound on the disturbances and their derivatives.
Contents
问题描述
问题背景
- The insensitivity and finite time convergence properties en-joyed by sliding mode controllers make them a useful approachfor systems with significant uncertainties
- these robust-ness properties come at a cost, usually termed ‘chattering’, result-ing from high frequency switching of the control signal
- Higher-order-sliding-modes offers significant chattering mitigation through increasing the input-output relative degree, providing continous signal
- contains structure pre-calculated by some bounds on the uncertainties (or derivatives of uncertainties )
- conservative upper bound are used to gurantee that sliding will take place
- conservation exacerbates chattering associated with the implementation
- Motivate #ASMC whereby the gains in controller adapt to a level where they are as small as possible and yet gurantee sliding is maintained
前人工作
前人缺陷
本文工作
- propose new equivalent control-based adaptive schemes for conventional , super-twisting and continous higher order sliding mode control algorithms
- the scheme allows magnitude and rate of change of the controller parameters to adapt whilst guranteeing a sliding motion
本文意义
实验方法
SISO Formulation
Problem Reform
consider a fitst-order sliding mode equation representing the dynamics of the switching variable:
^eqn-siso-formualtion
assume that and , consider the control law:
^eqn-siso-control-law
where is a small positive design constant and is a varing scalar term
Note that when , the -reachability condition is satisfied
note
should be ??
Based on previous paper, during sliding motion (), the so called equivalent contol should maintain , so that . Because a is unknown, we can obtain a close approximation by taking low-pass filter of the switch signal u(t):
Based on previous paper, when is small enough, can be small enough.
Assumption
exists a scalar and such that:
holds for all time after a finite time , to allow for the (fast) dissipation of the effects of the initial condition of the filter
^assum-1
Introduce a safety margin, rewrite the objective:
where and are designed scalar(depending on and ) chosen to ensure the estimate satisfies:
Now define an error variable:
^eqn-siso-error
Notice that when the , so the target is to forcing , so that the can be guranted.
note
- this methodology is basically to broaded the sliding manifold
- the trick here is to introduce a small constant to seperate target and approximation
corollary
Till now, the problem is reformed as a tracking problem, target is to gurantee error variable
New Methodology
The k(t) in ^eqn-siso-control-law can will be formed below:
^eqn-siso-k-adapt
In this paper, author give a form of as :
Based on different prior knowledge of uncertainties , different adaption law is proposed
When Bound a1 is Known
Assumption
In this subsection, is assumed to be unknown but bounded, but is available, i.e. the worst case rate of change of the disturbances
define :
where user-define scalar is a safety margin chosed to ensure:
^eqn-q-design
Give the adaption scheme :
definition
where is a design scalar
^eqn-siso-a1-adapt
By analysing the Lyaponov function:
and can ensure:
so and converge to 0 in finite time, and makes k satisfy condition
When Bound a1 and a0 Are Both Unknown
since is unknown, update the adaptive scheme as below:
where is a designed scalar
theorem
Consider above dual-adaptive sliding mode control law, and the uncertainties satisfy: and , where and are finite but unknown.
If choose to satisfy :
for any given and , then the control law forces in finite time and consequently ensures a sliding motion can be sustained.
^themrem-siso-a0-a1
remark
- The scalar needs to be larger than noise or computational errors
- The user defined parameters , are the safety factors whilst reflects the accuracy associated with the estimation of the equivalent control
- though is unknown, by selecting the adaptive gain sufficiently large (to dominate ), for any value of , and there always exists an to ensure ^themrem-siso-a0-a1 is satisfied
- the order of magnitude of should be known
- or can be choosed by simulation
note
看看人家怎么写解释的
Example
优点缺点
优点
- based on a dual-layer adaptive approach, do not rely on uncertainties
- adaptive idea can be deploy to conventional , super-twisting , higher-order control structure
缺点
- not actually model-free
- the accuracy of second-order method is low, and the direct method has chattering
个人评价
- Normal
- the idea of deploy adaptive law to other control scheme is great
- some tricks applied in demonstration is great
复现实验
我用 simulink 尝试复现其中的 Example 1,即最简单的 SISO 的模型,模型如下:
环境为: Matlab 2022a
作者给出了相关的参数,除了 这个自定义的参数。
不得不吐槽,这个方法参数怎么这么多
由于没有给定 q,论文中给了一个 q 的设计准则:
这里的 取 1,那么需要 q 大于 的微分,即大概是 a 的微分,那么 q>1 就可以了
note
不得不吐槽,这作者设计的算法仿真真的感觉有问题,太容易受扰动了,至少我用adaptive的结果太慢了,只能用定点的0.001步长仿真
note
还有一点可以吐槽,这个作者画的图,比如fig4,纵坐标轴都到3去了,误差就算在0.2也看不出来
仿真 1:q=1
note
取0.0001的步长仿真3s结果为:
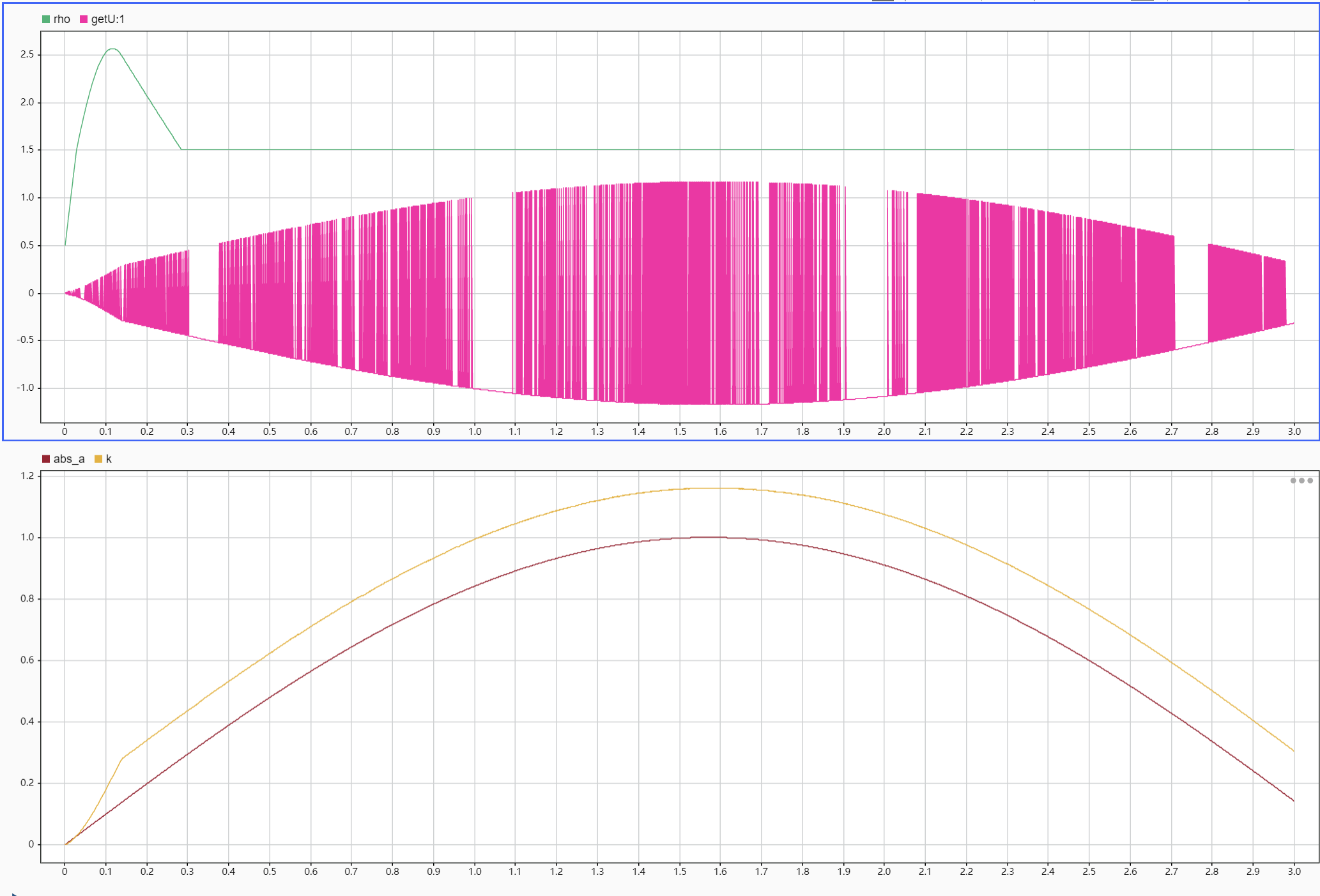
所以不是我仿真不行,是这个算法真的不对
仿真 2:q=1.5
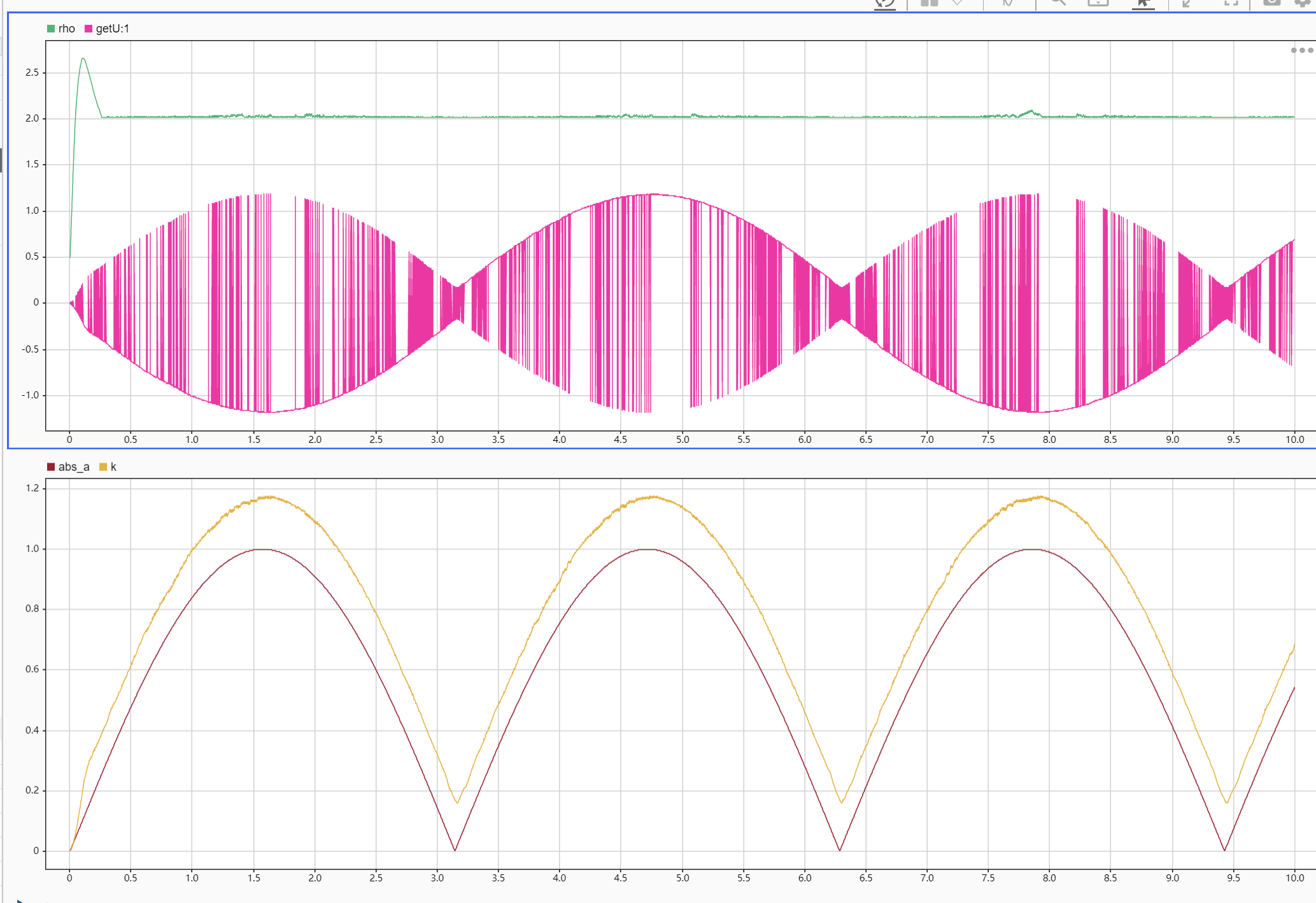
可以看到形式上和作者结果一样,但是精度实在太差
仿真 3:q=5
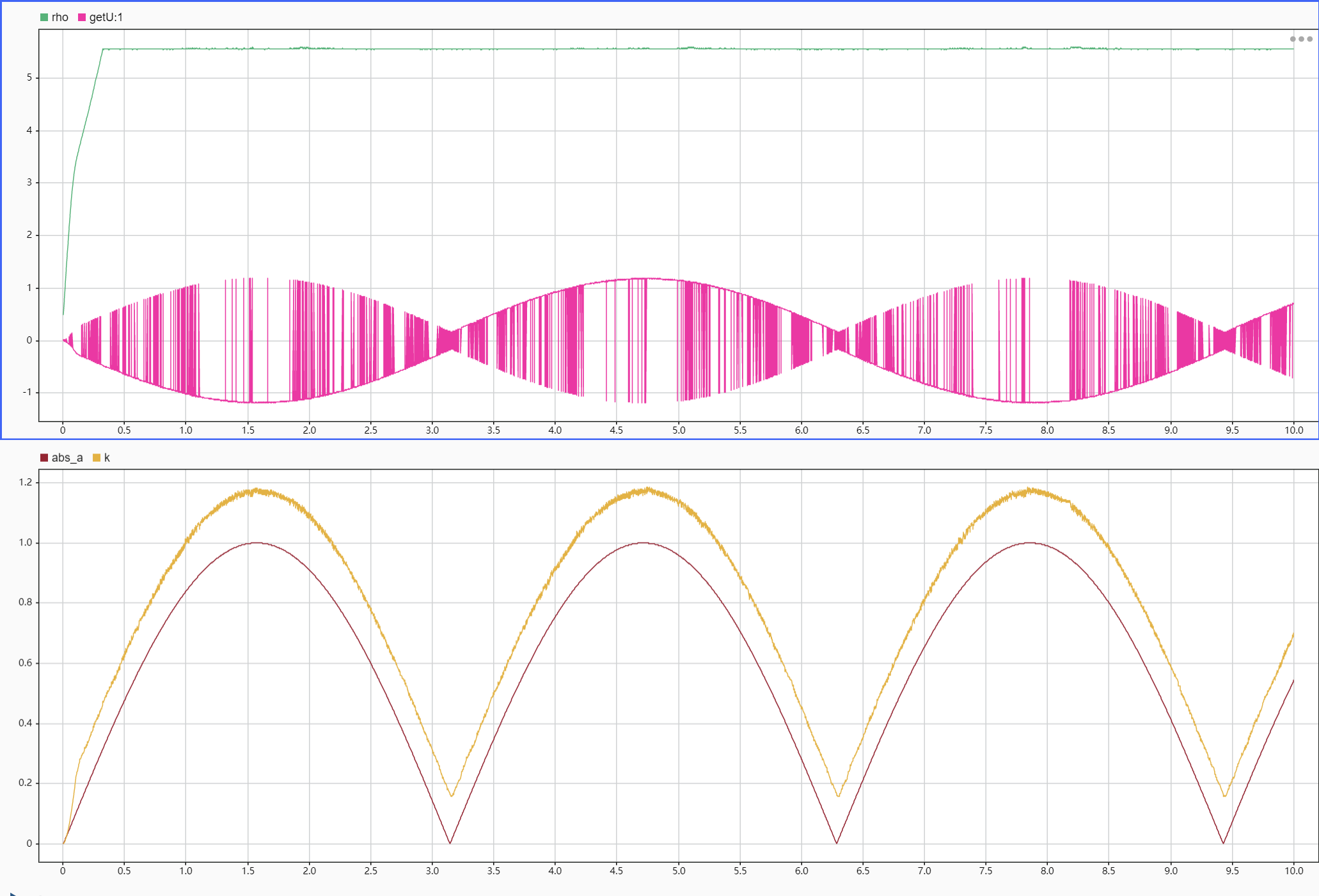
真的不对