@plestanNewMethodologiesAdaptive2010
@plestanNewMethodologiesAdaptive2010
plestanNewMethodologiesAdaptive2010
MetaInfo
文献标题
New methodologies for adaptive sliding mode control
Abstract
Contents
问题描述
问题背景
问题难点
在基本无信息的条件下实现自适应估计系统参数的滑模控制
前人工作
本文工作
本文意义
实验方法
问题分析
假定需要控制的非线性系统为:
其中 是系统的状态变量,f(x) 和 g(x) 是在 x 定义域内 有界的。假定控制的滑模变量为 ,目的是使得 。有
满足:
这些是我们仅有的条件,下面提出一些本文中的定义:
definition
- 理想滑模面:
- 实际滑模面:
其中理想滑模面物理上不可实现,因此改用实际滑模面替代。
具体算法
problem
提出给定这样一个控制器:
其中且很小。那么,可以证明,这样的控制器满足上面的要求
^eqn-control-law
首先,不失一般性,可以假设对任意时刻,。这很明显可以从我们 K 的取值看出。
lemma
在上面提出的非线性系统下,提出的增益K存在上界,即:
证明参考 APL1
进一步,给出这样的结论:
lemma
对上面的非线性系统和控制方法,存在有限的时间使得实际滑模面在所有的时候成立,即:
考虑李雅普诺夫函数,有:
从而微分有:
进一步添加构造项 有:
注意到根据上面的 Lemma1 有 ,从而
这意味着:
现在分析 的情况。
- Case1: ,此时有
注意到右边函数是增函数,因此取:
此时有:
根据李雅普诺夫收敛的性质,这表明在任何 的条件下,控制对象在有限时间内收敛
- Case2: 此时 可能为负这意味着李雅普诺夫的思路不能完全成功,但可以注意到,一旦 ,立马问题就解决了。因此我们需要考虑的就是分析状态切换需要的时间代价和精度问题。
记 ,。不失一般性,可以假设 ,否则其会一直增长。考虑 最坏情形,即:
这里的最坏情形意思是放任 增大,此时偏离滑模面的误差最大的情况。
根据上面的方程可以解得:
从而得到:
因此可以发现,在 时,最大的误差满足
这意味着 可以在有限时间内收敛到 case1 中的情况内,满足之前定义的真实滑模面
总的来说,论文基本到这里论证就结束了,后面还有一些关于参数优化的结论,这里就不展开了。
辅助证明
APL1
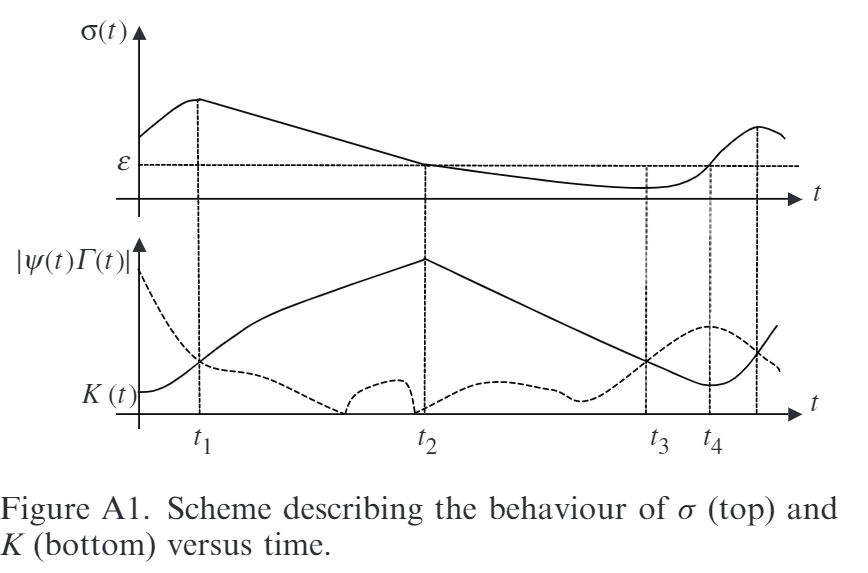
参考上面这张例图。图上半部分是滑模变量随着时间变化的图,下半部分是 K 随着时间变化的图。
假定一开始 ,则根据提出的控制器规则,^eqn-control-law, K 会一直增加,直到一个 t1 时刻使得 u 足够大,此时滑模变量 开始减小。在此之后,K 会继续增大,直到 再次碰到 ,此时 K 在 t2 时刻达到最大。继续这个进程,K 开始减小,直到 t3 时刻,K 太小以至于无法抵消外界扰动 (也就是使得 斜率再次为 0)。再进一步此时 K 增大 (这里意思是 K 不会太小,基本上会周期扰动),达到时刻 t4,回到一开始的起点。
note
论文中感觉不太对,不是所有点都满足
在这几段时间中,根据我们的分析,所有的 K 值是在 t1,t2,t3,t4 这四个点之中的,有:
其中在 t1,t3 点 为 0。由于这是光滑的现实系统,因此 是有界的,从而 K 存在上界 ,进而存在一个有限的 使得其为上界。
优点缺点
优点
缺点
个人评价
我个人觉得论文论证有点不太严谨,比如 APL1 部分或许就存在一些问题。
此外,论文里面的 switch function 全部使用的 sign 这种不连续函数,这会导致剧烈的 K 值抖动,进而影响控制量 u 的相位。这一现象在达到了真实滑模面后更加明显,小范围的相位变化很常见,这一问题可以通过采用光滑的切换函数 (eg. tanh) 实现。