Chap1 问题引入
2022年9月29日
Chap1 问题引入
书籍简介
提供一个统一的针对机械系统控制的方法论,从系统建模、分析到设计;这一流程是通过几何的角度来完成的(Riemannian and affine geometry)
本书的目录被分为 3 大块:
- 处理建模问题
- 处理控制系统的分析问题
- 处理控制系统的设计问题
Motivations
刚体系统
对刚体系统,其中的控制问题可以是非线性的。一个简单的例子如下:
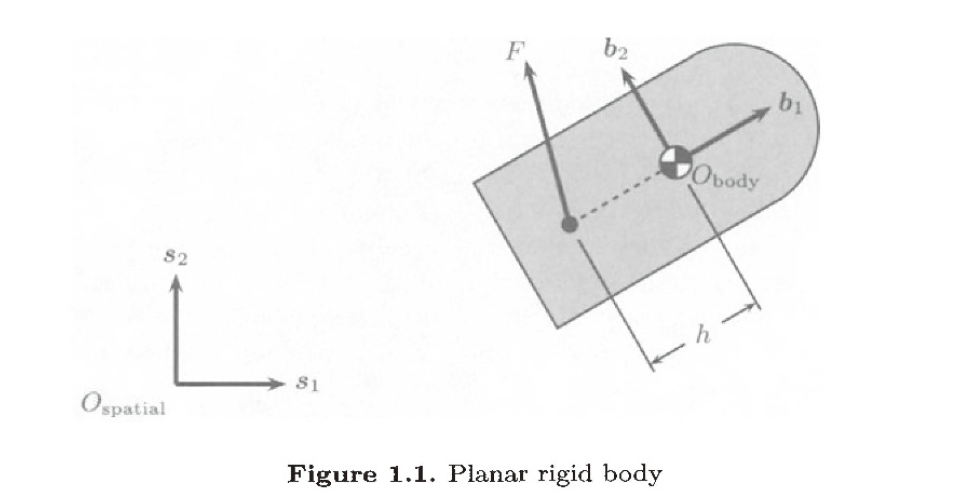 ^fig-plannar-rigid-body-1
^fig-plannar-rigid-body-1
这一系统描述了一个简化的二维小船,显然它具有 3 个自由度。我们考虑通过其广义坐标来描述构型空间,广义坐标为:,也可以将其表示为:
note
下面这种表示强调了构型空间的矩阵群结构,我们将在homogeneous representation中详细介绍这点
这个系统的速度可以在惯性系 下描述,也可以在随体坐标系 下描述,记速度分别为: 和 ,那么有:
通过坐标 和 ,可以决定这个系统的状态。从而我们可以将系统的能量给表述出来:
note
利用动能和势能可以直接构造出拉格朗日方程,从而完成系统动力学建模
其中 是 F 在 i 上的分量
根据这个动力学方程,我们可以考虑下面的问题:
是否可能从一个给定的状态控制到另一个任意的期望状态
参考
引文
脚注
Loading...