机构自由度计算
2022年8月9日
机构自由度计算
机构自由度计算
定义
机构自由度计算是一个探索了 150 年的问题,人们有多种计算方式,可以我写的自然辩证法论文 。
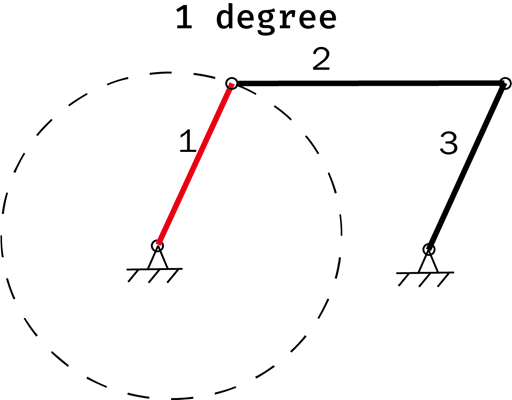
经典的 G-K 公式
例子如下图:
Jacobian 方法
假设机构相对一个参考点有 Jacobian 矩阵 ,其满足
其中: 是关节坐标系下的坐标, 是世界坐标系下坐标 (并联机构则存在两个 Jacobian)。
那么机构自由度为 J 的零空间维数。
如下图:
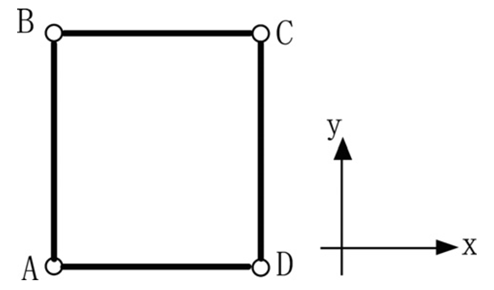
其中参数为:
假定 x 坐标满足形式:
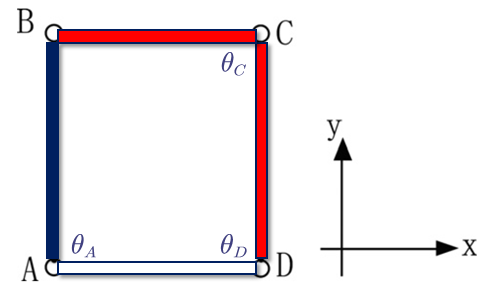
那么对参考点 B实际上是 B 的一小段邻接部分,这样才能有完整的 6 个自由度
从支链 AB 和 DC 分别有:
注意 ,因为包含了 B 的一小段邻接部分,因此可以包含关节 B 本身的角速度,其对 z 方向角速度有影响,但对其余方向速度无影响。
对合成的 J 使用奇异值分解考虑其零空间:
因此维数为 1.
约束方程角度
分别对 AB 和 DCB 的工作空间作图,求交集:
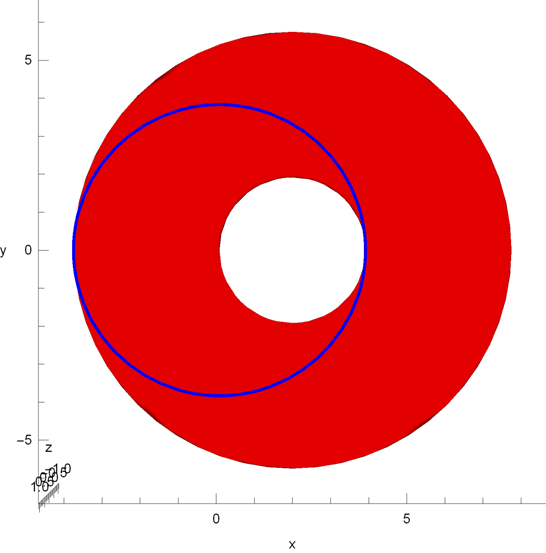
因此为 1 维。
参考
Loading...