摩擦力建模
2022年9月22日
摩擦力建模
定义
对摩擦力的模型进行介绍,并介绍了解到的辨识方法,主要分为:
- 平动摩擦
- 转动摩擦
方案
平动摩擦
转动摩擦
动力学模型
经典模型
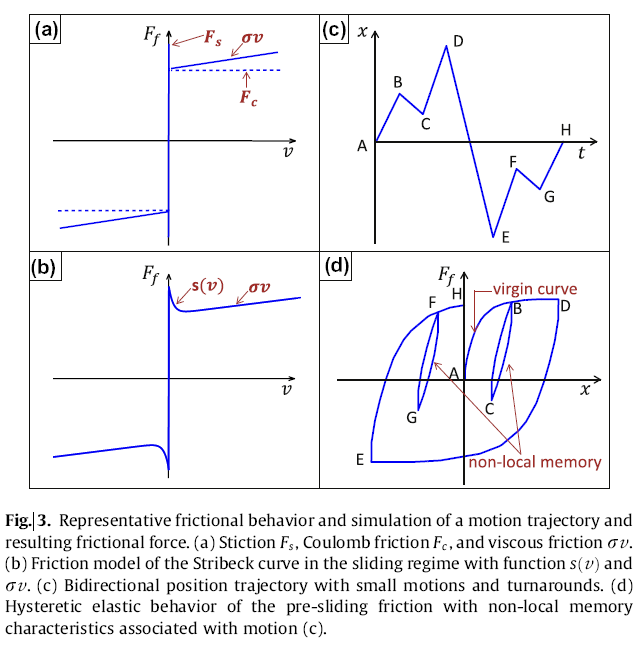
经典的平动的摩擦模型是 ,这是一种库伦摩擦力的体现。当其中引入了 static friction 和一个线性的 viscous drag term 后,其摩擦力图景如图 ^img-fig3 的 (a) 所示。如果增加了滑动状态下的连续速度依赖性,就得到了 Stribeck 提出的模型,如图 (b) 所示,形式为:
其中包含了 vsicous friction,且:
- 代表 Coulomb friction
- 代表 Static friction
- 代表 stribeck velocity
- 代表 shape factor
- 代表 viscous coefficient
这一模型经常被称为 static 的因为该模型的参数是可以直接通过常值速度下的试验测量得到的。这一模型有一个大的缺点在于其 0 点不连续性,从而无法解释:
- friction lag
- rate-dependent breakaway force
- hysteresis with non-local memory
 ^img-fig3
^img-fig3
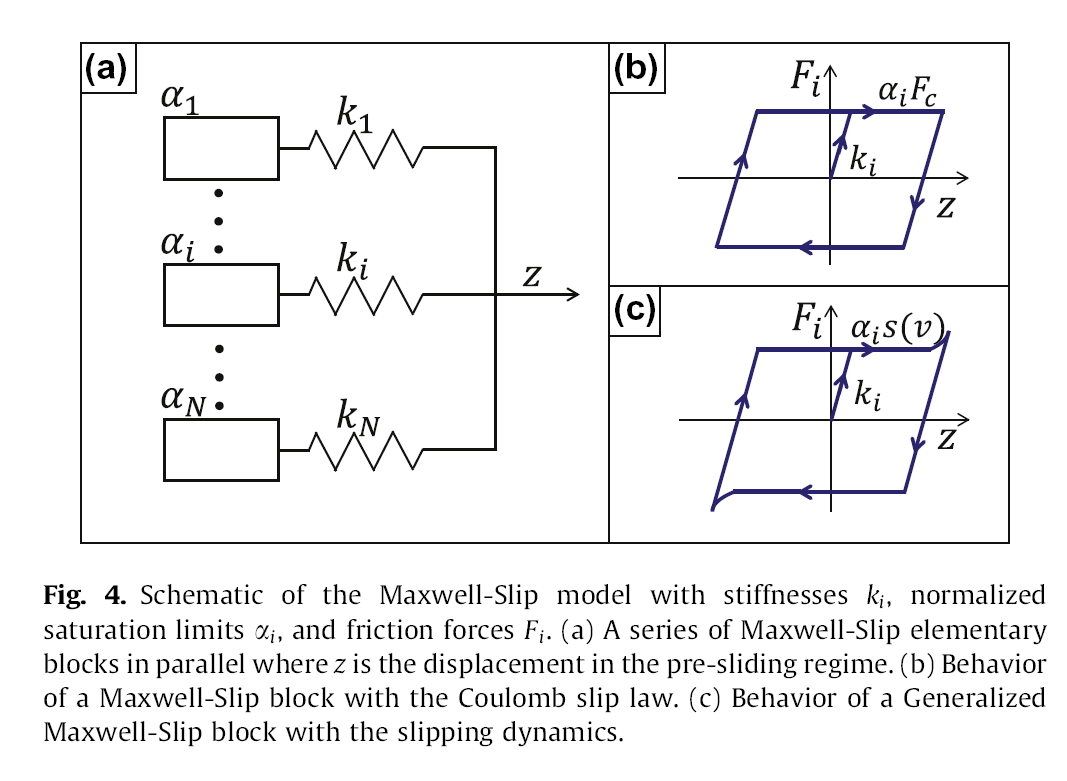
扩展模型——GMS
为了解决上面提出的问题,提出了 GMS 模型
其中 C 是一个 attraction factor 决定了 slipping dynamics 跟随速度曲线的变化速率
其参数辨识和具体细节可以参考:
@yoonFrictionModelingIdentification2014
经典模型——形式 2
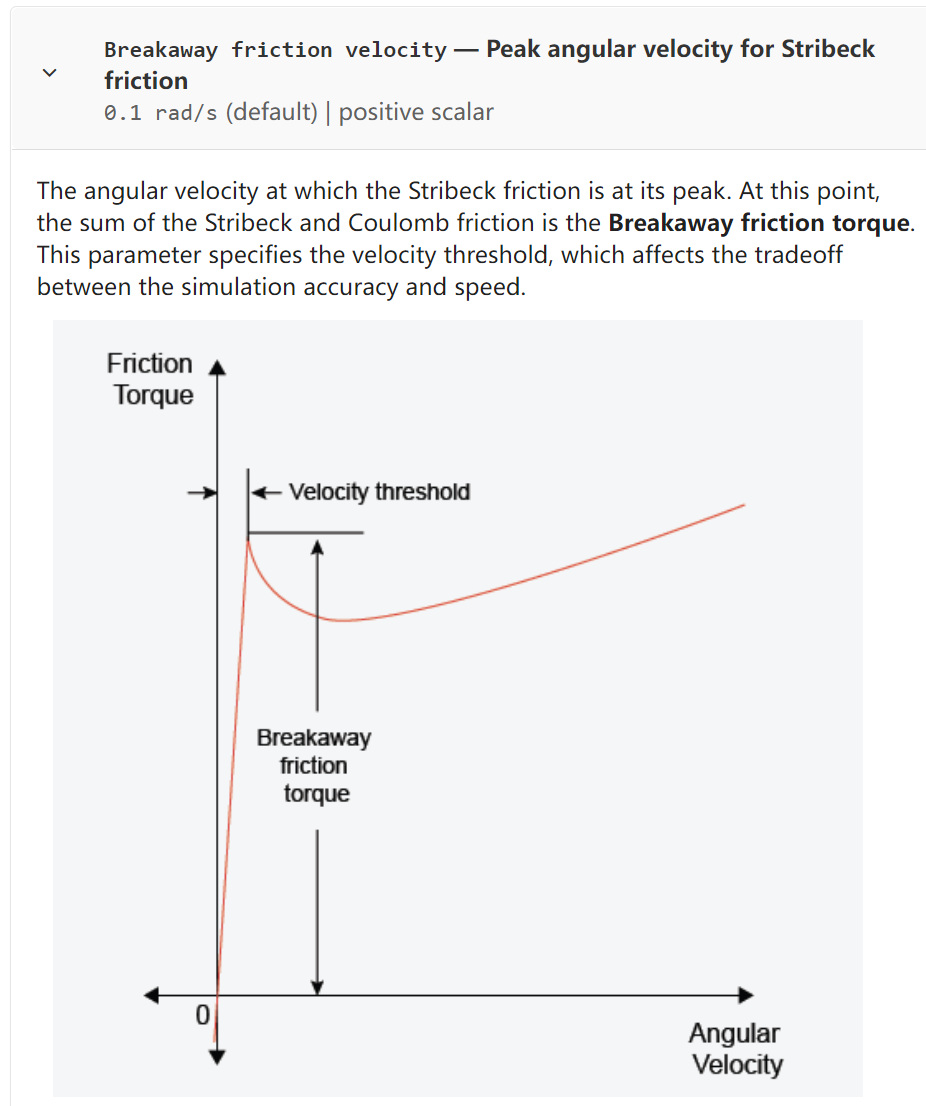
转动摩擦的动力学模型被写为下面的形式:

其中可以分为 3 个部分:
- Stribeck friction :在低速情况下的反向曲线
- Coulomb friction :在任何速度下的恒定力矩
- Viscous friction :和相对速度成正比的力矩
完整的摩擦力力矩表达式为:
其中:
- 是摩擦力矩
- 是 Coluomb 摩擦力矩
- 是启动的 breakaway 力矩
- 是 breakaway friction velocity
- 是 Stribeck velocity threshold
- 是 Coulomb velocity threshold
- 是相对的两物体 R 和 C 的角速度
- 是相对速度
- 是 viscous friction 系数
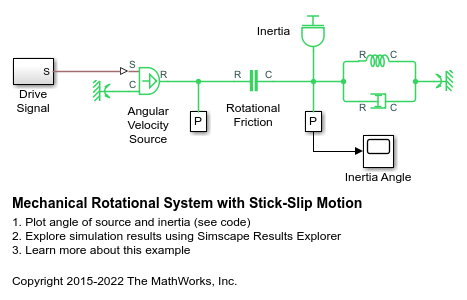
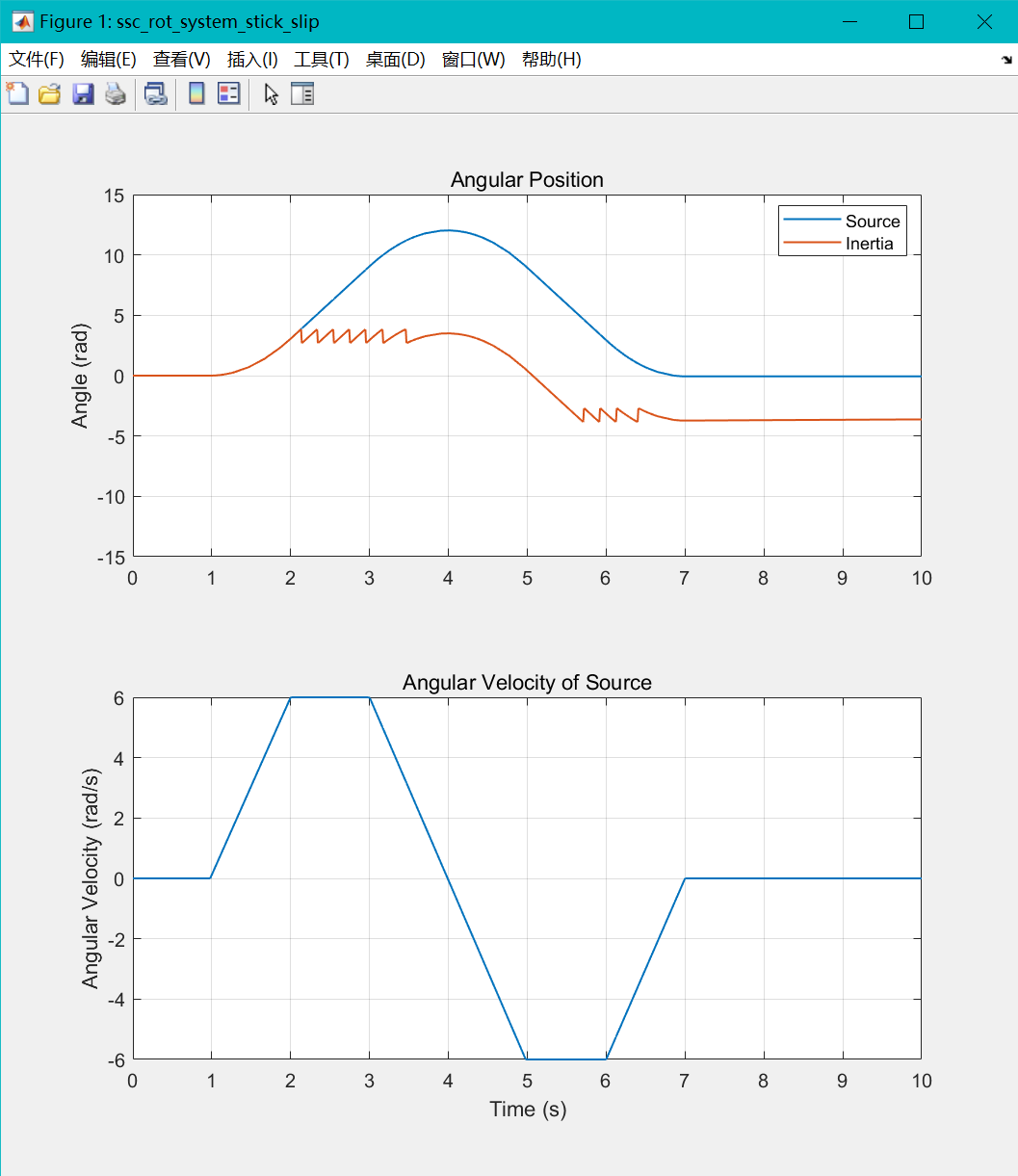
其相关的数值模拟可以参考:
摩擦辨识测试
根据提供的摩擦力式子,构造摩擦力如下:
P.Tbrk = 50;
P.Tc = 20;
P.wbrk = 0.2;
P. f = 0.1;
w = -20:1e-3:20;
T = arrayfun(@(x) fm1(x, P), w);
plot(w, T)
其中函数为:
function T = fm1(w, P)
Tbrk = P.Tbrk;
Tc = P.Tc;
wbrk = P.wbrk;
f = P.f;
wst = wbrk/sqrt(2);
wcoul = wbrk/10;
T = sqrt(2*exp(1))*(Tbrk-Tc)*exp(-(w/wst)^2)*w/wst + Tc*tanh(w/wcoul) + f*w;
end
用于拟合的函数为:
sqrt(2*exp(1))*(Tbrk-Tc)*exp(-(w/(wbrk/sqrt(2)))^2)*w/(wbrk/sqrt(2))+ Tc*tanh(w/(wbrk/10)) + f*w;
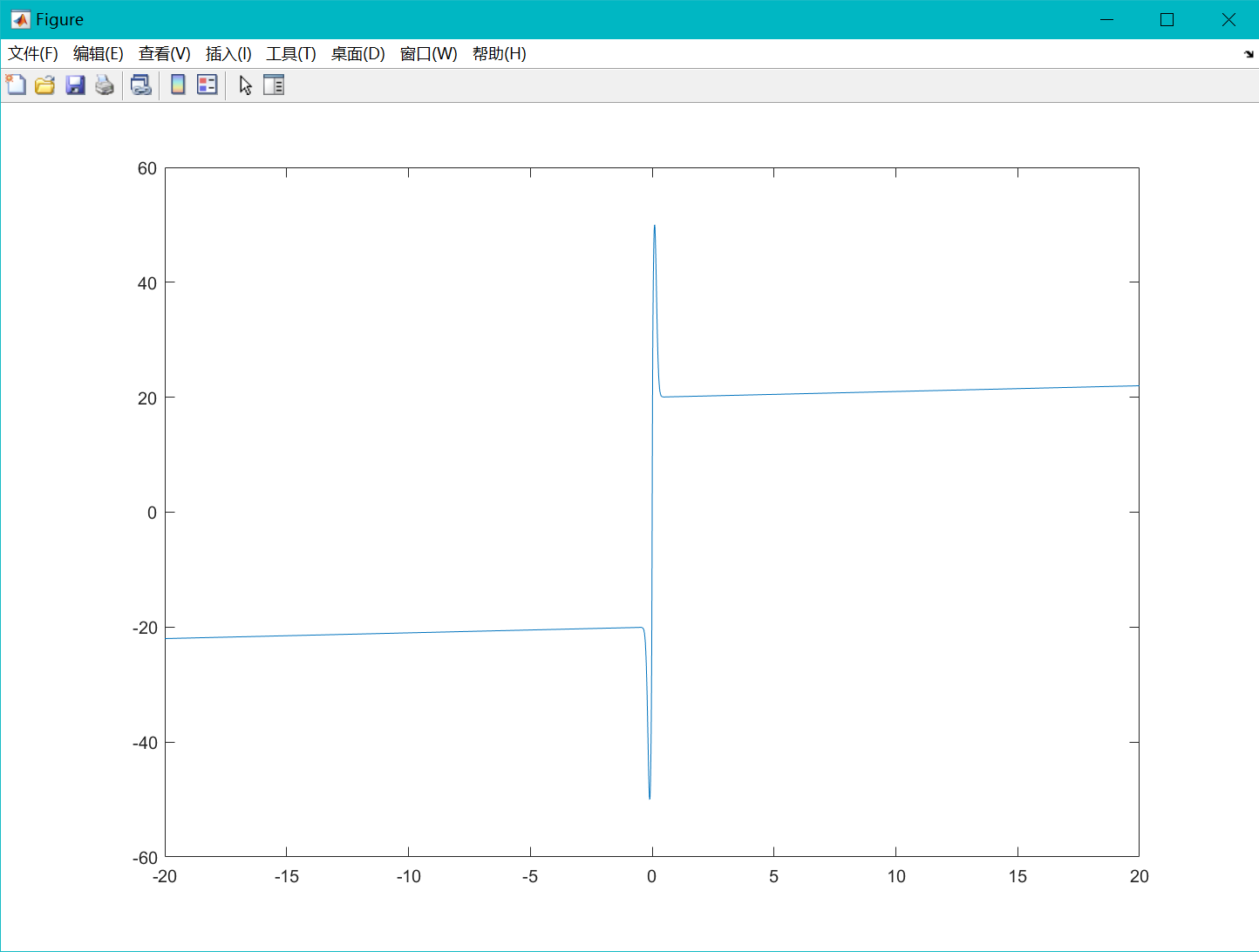
做出的摩擦力图为:
使用 matlab 的曲线拟合工具的自定义曲线拟合,结果如下:
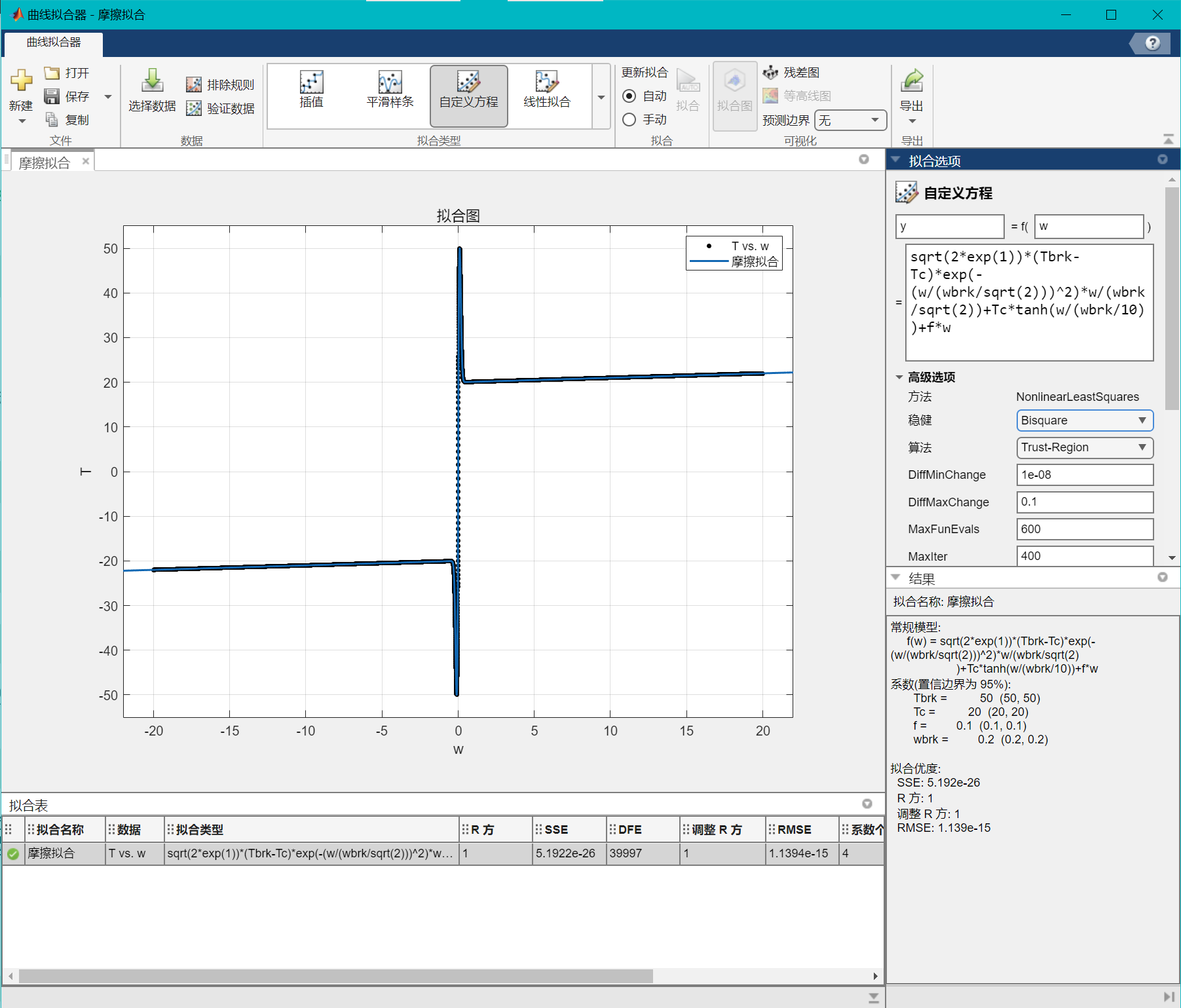
可以发现精度很好,牛的
代码参考:
参考
引文
- @yoonFrictionModelingIdentification2014
- Friction in contact between rotating bodies - MATLAB - MathWorks 中国
脚注
Loading...